毎月第1・第3月曜日はシモパケDAY!商品全品3%OFF!

ロボットハンド用パーツの業務用商品をお安い価格でお求めいただける通販ページです。

絞り込み:
![]()
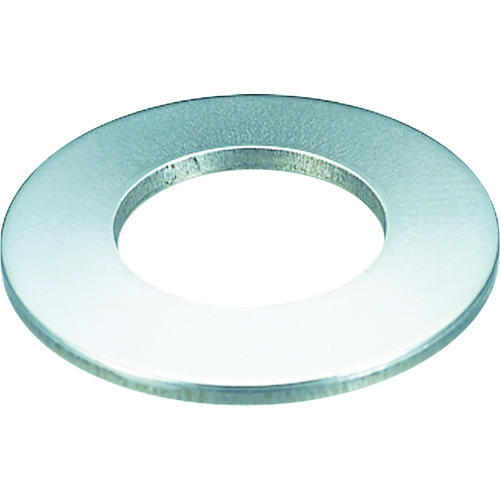
トラスコ中山 アインツ テーパーワッシャー・ミニ用(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●吸着金具用テーパーワッシャーです。●内径(mm):10●外径(mm):19.8●厚さ(mm):1.3●対象金具:ミニ金具、回止金具(10)、スモール金具(12)●内径:φ10
価格: 77円(税込)
数量

![]()
トラスコ中山 アインツ チャックワンタッチ・ステンレス・ロボ 388-6779 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●1本のネジを締めるだけでハンドが交換完了します。●タイプ:ロボット側●幅(mm):75●奥行(mm):83●高さ(mm):25●可搬重量(kg):~10●引込力/押出力(N):650/40●連結時の厚み:24mm●取付ネジ:M6
価格: 25,111円(税込)
数量

![]()
トラスコ中山 アインツ D-SUBケーブルl・OX用 1.5m 388-8424 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●ツールチェンジャー用コネクターハーネス●タイプ:ツール側●ハーネス長(mm):1500●ツールチェンジャーアクセサリー●適応コネクター:OX-DPS09A-I、OXR-DPS09-I●電気接点:9芯●コネクターカバー:L字タイプ●可動ケーブル(AWG22)、UL規格対応●曲げ半径:R46●D-SUB&プローブコネクターに対応
価格: 8,091円(税込)
数量

![]()
トラスコ中山 アインツ D-SUBケーブルL・OX用 388-8426 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●ツールチェンジャー用コネクターハーネスです。●ロボットケーブルを使用しています。●タイプ:ロボット側●ハーネス長(mm):500●コネクタータイプ:L型●UL規格対応●電気接点:9芯●曲げ半径:R46●D-SUB&プローブコネクターに対応
価格: 7,255円(税込)
数量

![]()
トラスコ中山 アインツ D-SUBケーブルL・OX用 1.5m 388-8427 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●ツールチェンジャー用コネクターハーネス●ロボットケーブルを使用しています。●タイプ:ロボット側●ハーネス長(mm):1500●ツールチェンジャーアクセサリー●適応コネクター:OX-DPS09A-I、OXR-DPS09-I●電気接点:9芯●コネクターカバー:ストレートタイプ●可動ケーブル(AWG22)、UL規格対応●曲げ半径:R46●D-SUB&プローブコネクターに対応
価格: 8,371円(税込)
数量

![]()
トラスコ中山 アインツ ツールチェンジャー・ロボット側 388-9919 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●ロボットハンドを短時間で簡単に交換できます。●独自の離脱機構搭載です。(特許第4126074号)●フェールセーフ機構内蔵です。●エアーチェッキ弁内蔵です。(ロボット側)●フレームを超ジュラルミン製、着脱部が鉄製のハイブリット構造です。●タイプ:ロボット側●幅(mm):150●奥行(mm):95●高さ(mm):59.5●可搬重量(kg):~35●引込力/押出力(N):4000/750●コネクタ形成:D-SUBコネクター&プローブコネクタ●位置再現精度:±0.02mm●使用空気圧:0.5~0.7MPa●配管接続:6回路/M5●電気接点:9芯×2 (2A DC24V Max)●連結時の厚み:60mm●超ジュラルミン+鉄製
価格: 57,071円(税込)
数量

![]()
トラスコ中山 アインツ ツールチェンジャー・ツール側 388-9920 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●独自の離脱機構搭載です。(特許第4126074号)●フェールセーフ機構内蔵です。●ロボットハンドを短時間で簡単に交換できます。●エアーオプションの追加が可能です。●タイプ:ツール側●幅(mm):150●奥行(mm):80●高さ(mm):27.5●可搬重量(kg):~35●引込力/押出力(N):4000/750●使用空気圧:0.5~0.7MPa●連結時の厚み(mm):60●コネクタ:D-SUBコネクタ&プローブコネクタ●電気接点:9芯×2 (2A DC24V Max)●配管接続:6回路(M5)●位置再現精度(mm):±0.02●超ジュラルミン+鉄製
価格: 32,087円(税込)
数量

![]()
トラスコ中山 アインツ ワイヤレスコネクター4P・ロボット側 388-9932 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●非接触なので水、粉塵の多い場所でも使用可能です。●出力形式はNPN式となります。●タイプ:ロボット側●取付位置:ロボット側●適合機種:OX-SB●幅(mm):35●奥行(mm):20●高さ(mm):53●ハーネス長(mm):2000●入出力点数:4点+1点●供給電源圧:DC24V●ドライブ電圧:12V±1.5VDC●保護構造IP67対応●ケーブル長さ:ロボット側2m、ツール側1m●出力形式:NPN方式●付属取付ねじ:十字穴付きナベ小ねじ M3×8●回路保護:短絡保護、逆接保護、サージ保護●入出力点数:4点+1点
価格: 79,392円(税込)
数量

![]()
トラスコ中山 アインツ ワイヤレスコネクター4P・ツール側 388-9934 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●非接触なので水、粉塵の多い場所でも使用可能。●出力形式はNPN式となります。●タイプ:ツール側●適合機種:OX-SBI●幅(mm):35●奥行(mm):18●高さ(mm):53●入出力点数:4点●ツールチェンジャーアクセサリー●ドライブ電圧:12V±1.5VDC●入出力点数:4点●ケーブル長さ:ツール側1m●保護構造:IP67対応●付属取付ねじ:十字穴ナベ小ねじ M3×8
価格: 61,509円(税込)
数量

![]()
トラスコ中山 アインツ ワイヤレスコネクター12P・ロボット側 388-9935 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●非接触なので水、粉塵の多い場所でも使用可能です。●出力形式はNPN式となります。●タイプ:ロボット側●適合機種:OX-LB●幅(mm):48●奥行(mm):37●高さ(mm):65●ハーネス長(mm):2000●入出力点数:12点+1点●ツールチェンジャーアクセサリー●ドライブ電圧:12V±1.5VDC●付属取付ねじ:十字穴付ナベ小ねじ M3×8●ケーブル長さ:ロボット側2m●回路保護:短絡保護、逆接保護、サージ保護●供給電源圧:DC24V●保護構造:IP67対応
価格: 102,980円(税込)
数量

![]()
トラスコ中山 アインツ ワイヤレスコネクター12P・ツール側 388-9933 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●非接触なので水、粉塵の多い場所でも使用可能です。●出力形式はNPN式となります。●タイプ:ツール側●適合機種:OX-LBI●幅(mm):48●奥行(mm):29●高さ(mm):65●ハーネス長(mm):1000●入出力点数:12点●ツールチェンジャーアクセサリー●ドライブ電圧:12V±1.5VDC●入出力点数:12点●ケーブル長さ:ツール側1m●付属取付ねじ:十字穴付ナベ小ねじ M3×8●保護構造:IP67対応
価格: 82,055円(税込)
数量
![]()
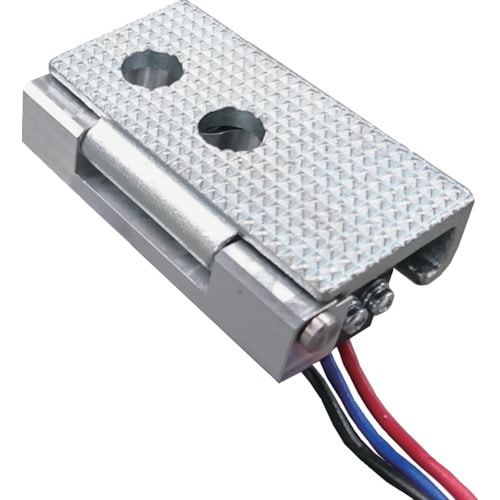
トラスコ中山 アインツ 当板・角型・鉄SW付・ミニシリンダー用(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●シリンダーの出限/戻限を確認するオートSWを取り付ける溝をボディー側面に施してします。●タイプ:ミニシリンダー用●幅(mm):50●奥行(mm):13.9●高さ(mm):28.6●素材:鉄(設置面)●対象シリンダー:UMCD、MCD、MCP1-10・20シリーズ
価格: 8,091円(税込)
数量

![]()
トラスコ中山 アインツ バーブ継手 388-6799(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ツールチェンジャー(ツール側)のエアーポート交換用継手です。●タイプ:OX-SB,LB,WLB,20B●幅(mm):8.5●奥行(mm):8.5●高さ(mm):13.5●適合機種:OX-A/B・OX-20●接続ねじ:M5
価格: 280円(税込)
数量

![]()
トラスコ中山 アインツ バーブ継手 388-6796(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ツールチェンジャー(ツール側)のエアーポート交換用継手です。●タイプ:OX-35A,60A用●幅(mm):10●奥行(mm):10●高さ(mm):13.5●適合機種:OX-35/60●ツールチェンジャーアクセサリー
価格: 838円(税込)
数量

![]()
トラスコ中山 アインツ パッキン(ツール側)(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ツールチェンジャー(ツール側)のエアーポート用交換パッキン。●適合機種:OX-30AI/60AI●幅(mm):9●奥行(mm):9●高さ(mm):6●ツールチェンジャーアクセサリー
価格: 254円(税込)
数量

![]()
トラスコ中山 アインツ バーブ継手 388-6797(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ツールチェンジャー(ツール側)のエアーポート交換用継手です。●タイプ:OX-WSB用●幅(mm):8.5●奥行(mm):8.5●高さ(mm):12.5●適合機種:WSBI●ツールチェンジャーアクセサリー
価格: 558円(税込)
数量

![]()
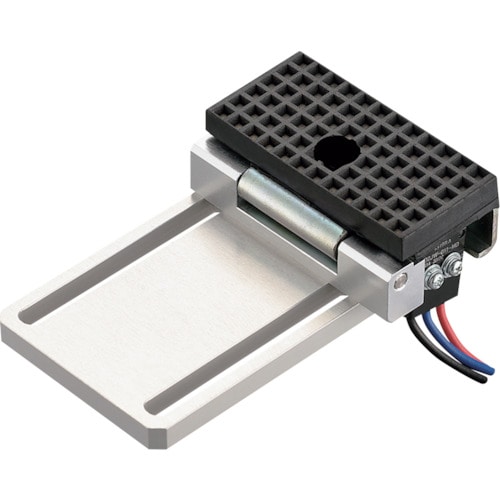
トラスコ中山 アインツ マグネットチャック(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ネオジム磁石を内蔵した特殊チャックです。●タイプ:複動●幅(mm):26●奥行(mm):83●高さ(mm):26●バッファストローク(mm)●径(mm)●材質●取付接続●真空取出口●構造:複動型●使用空気圧:0.39~0.5MPa●保持力:25N●残存磁力:0.01N以下●接続ホース:φ4mm
価格: 11,998円(税込)
数量

![]()
トラスコ中山 アインツ マグネットチャック先端ゴム(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●バッファストローク(mm)●径(mm)●材質●取付接続●真空取出口●対象:MGC-20●ウレタンゴム
価格: 1,116円(税込)
数量
![]()
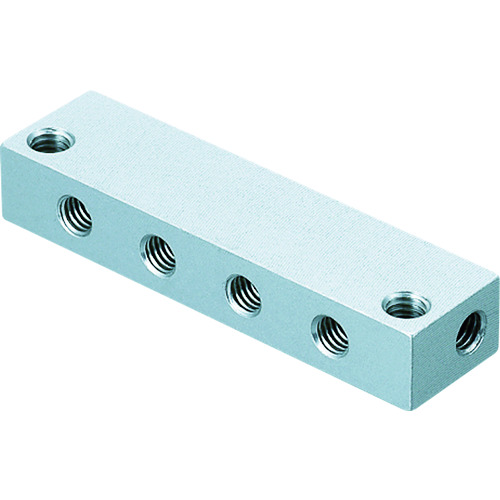
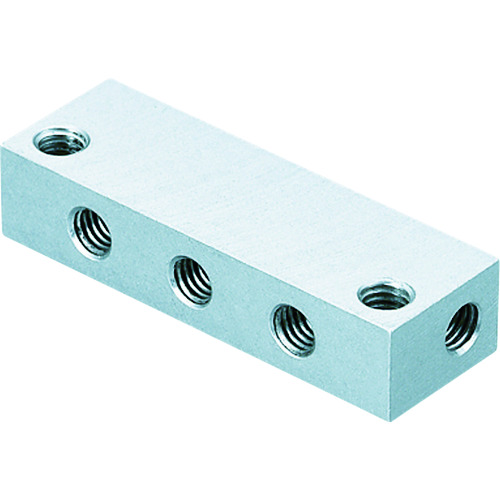
トラスコ中山 アインツ マニホールド・ミニ用 115-7547(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●エアー回路を複数に分岐させます。●縦(mm):15●横(mm):58●高さ(mm):10●接続口径:M5●アルミ
価格: 1,332円(税込)
数量
![]()
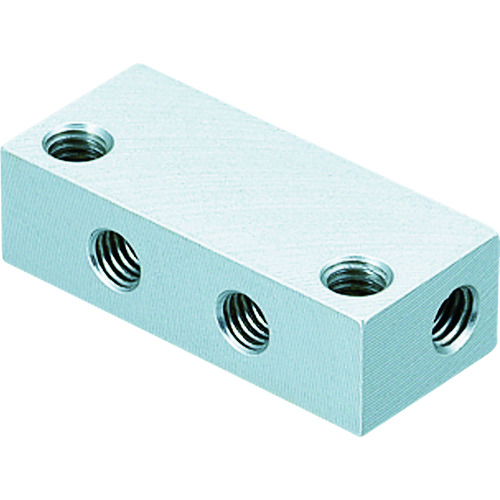
トラスコ中山 アインツ マニホールド・ミニ用 115-7545(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●エアー回路を複数に分岐させます。●縦(mm):15●横(mm):34●高さ(mm):10●接続口径:M5●アルミ
価格: 1,205円(税込)
数量
![]()
トラスコ中山 アインツ マニホールド・ミニ用 115-7546(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●エアー回路を複数に分岐させます。●縦(mm):15●横(mm):46●高さ(mm):10●接続口径:M5●アルミ
価格: 1,270円(税込)
数量

![]()
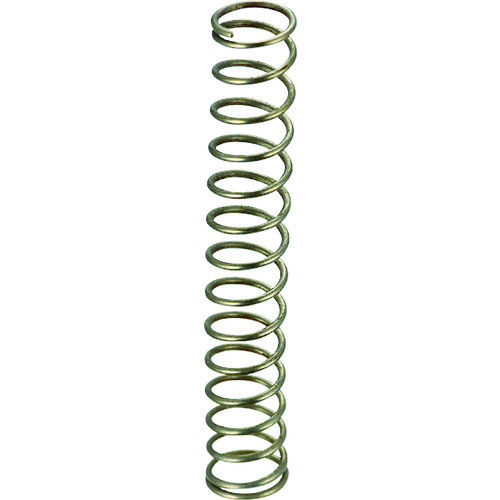
トラスコ中山 アインツ ピストン用スプリング 115-7265(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ピストンのスプリングです。●適合機種:NC/NW1-10、10R●対応ニッパー:NWシリーズ●ニッパーNW10、NW20は1台につき2個使用します。
価格: 178円(税込)
数量

![]()
トラスコ中山 アインツ スライドスプリング 115-7268(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●エアーニッパーのスライド用のスプリングです。●適合機種:NW-10●対応ニッパー:NWシリーズ
価格: 140円(税込)
数量

![]()
トラスコ中山 アインツ 取付金具・ミニエアーニッパー用 (ご注文単位1個)【直送品】
ロボットハンド用パーツ
●オリジナルナット(M8)でフレーム等に固定が可能です。●適合機種:NW3-20シリーズ●幅(mm):30●高さ(mm):32●奥行(mm):30●取付金具:NW-20用●付属品:ニッパー取付用M4ボルト(2本)
価格: 2,372円(税込)
数量
![]()
トラスコ中山 アインツ ピストン用スプリング 115-7266(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ピストンのスプリングです。●適合機種:NC/NW-20、20R●対応ニッパー:NWシリーズ●ニッパーNW10、NW20は1台につき2個使用します。
価格: 216円(税込)
数量

![]()
トラスコ中山 アインツ スライドスプリング 115-7269(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●エアーニッパーのスライド用のスプリングです。●適合機種:NW-20、35●対応ニッパー:NWシリーズ
価格: 140円(税込)
数量

![]()
トラスコ中山 アインツ コンテナシリンダー・複動型 388-6819(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ロットが2本の特殊構造で円滑な動作です。●作動限・復帰限用オートスイッチの装着が可能です。●ストローク(mm):20●幅(mm):85●奥行(mm):70●高さ(mm):25●取付穴:M5ナット用取付溝●出力(N)押し:314●出力(N)引き:263●構造:複動型●使用空気圧:0.4~0.5MPa●押し出力:314N(使用圧力0.5MPa時)●引き出力:263N(使用圧力0.5MPa時)●配管接続:M5●接続ホース:φ4mm
価格: 12,428円(税込)
数量

![]()
トラスコ中山 アインツ コンテナシリンダー・複動型 388-6818(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ロットが2本にある特殊構造で円滑な動作です。●作動限・復帰限用オートスイッチの装着が可能です。●ストローク(mm):40●幅(mm):105●奥行(mm):70●高さ(mm):25●取付穴:M5ナット用取付溝●出力(N)押し:314●出力(N)引き:263●構造:複動型●使用空気圧;0.4~0.5Mpa●押し出力:314N(使用圧力0.5Mpa時)●引き出力:263N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 13,951円(税込)
数量

![]()
トラスコ中山 アインツ コンテナシリンダー・複動型 388-6817(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ロットが2本にある特殊構造で円滑な動作です。●作動限・復帰限用オートスイッチの装着が可能です。●ストローク(mm):80●幅(mm):145●奥行(mm):70●高さ(mm):25●取付穴:M5ナット用取付溝●出力(N)押し:314●出力(N)引き:263●構造:複動型●使用空気圧:0.4~0.5Mpa●押し出力:314N(使用圧力0.5Mpa時)●引き出力:263N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 15,980円(税込)
数量

![]()
トラスコ中山 アインツ 当板・ミニコン用 387-8835(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ミニコンテナシリンダーロッドの先端に取り付けてご使用ください。●タイプ:ミニコンテナシリンダー用●幅(mm):40●奥行(mm):15●高さ(mm):30●素材:ニトリルゴム(設置面)●対象シリンダー:NCONシリーズ●ニトリルゴム
価格: 1,611円(税込)
数量
![]()
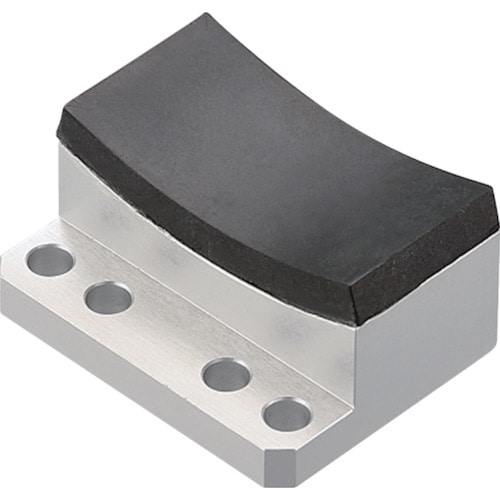
トラスコ中山 アインツ 当板・ミニコン用(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ミニコンテナシリンダーロッドの先端に取り付けてご使用ください。●タイプ:ミニコンテナシリンダー用●幅(mm):40●奥行(mm):30●高さ(mm):19.7●素材:ニトリルゴム(設置面)●対応シリンダー:NCONシリーズ●ニトリルゴム
価格: 1,967円(税込)
数量
![]()
トラスコ中山 アインツ 当板・ミニコン用 388-0424(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ミニコンテナシリンダーロッドの先端に取り付けてご使用ください。●高さ調整が可能。●タイプ:ミニコンテナシリンダー用●幅(mm):42●奥行(mm):20●高さ(mm):89●素材:ニトリルゴム(設置面)●対象シリンダー:NCONシリーズ●ニトリルゴム
価格: 2,854円(税込)
数量

![]()
トラスコ中山 アインツ 当板・ミニコン用 388-0420(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ミニコンテナシリンダーロッドの先端に取り付けてご使用ください。●高さ調整が可能。●先端が35度曲げを施してあります。●タイプ:ミニコンテナシリンダー用●幅(mm):42●奥行(mm):15●高さ(mm):108●素材:ニトリルゴム(設置面)●対象シリンダー:NCONシリーズ●ニトリルゴム
価格: 2,094円(税込)
数量
![]()
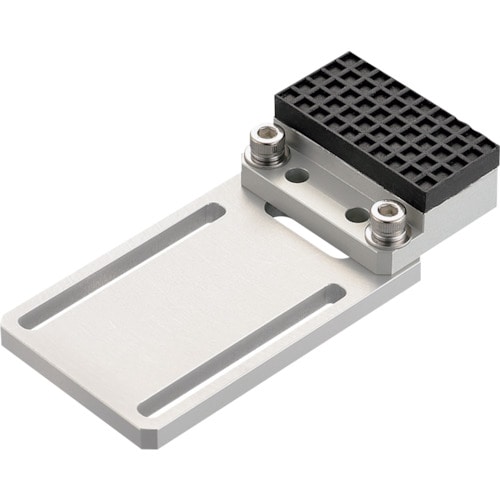
トラスコ中山 アインツ 当板・ミニコン用 388-0422(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ミニコンテナシリンダーロッドの先端に取り付けてご使用ください。●高さ調整が可能。●ワーク確認センサー付きです。●タイプ:ミニコンテナシリンダー用●幅(mm):51●奥行(mm):25.6●高さ(mm):75●素材:ニトリルゴム(設置面)●対象シリンダー:NCONシリーズ●ニトリルゴム
価格: 8,371円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・単動型 388-6820(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●作動限・復帰限用オートスイッチ(別売品)の装着が可能です。●ストローク(mm):10●幅(mm):40●奥行(mm):61●高さ(mm):24●取付穴:2-M5●出力(N)押し:154●構造:単動型●使用空気圧:0.4~0.5MPa●押し出力:154N(使用圧力0.5MPa時●配管接続:M5●接続ホース:φ4mm
価格: 9,194円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・複動型 388-6826(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●ストローク(mm):10●幅(mm):40●奥行(mm):56●高さ(mm):24●取付穴:2-M5●出力(N)押し:154●出力(N)引き:129●構造:複動型●使用空気圧:0.4~0.5MPa●押し出力:154N(使用圧力0.5MPa時)●引き出力:129N(使用圧力0.5MPa時)●配管接続:M5●接続ホース:φ4mm
価格: 7,483円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・単動型 388-6821(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●作動限・復帰限用オートスイッチ(別売品)の装着が可能です。●ストローク(mm):15●幅(mm):40●奥行(mm):66●高さ(mm):24●取付穴:3-M5●出力(N)押し:154●構造:単動型●使用空気圧力:0.4~0.5Mpa●押し出力:154N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 11,415円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・複動型 388-6827(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●ストローク(mm):15●幅(mm):40●奥行(mm):61●高さ(mm):24●取付穴:2-M5●出力(N)押し:154●出力(N)引き:129●構造:複動型●使用空気圧力:0.4~0.5Mpa●押し出力:154N(使用圧力0.5Mpa時)●引き出力:129N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 7,736円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・単動型 388-6822(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●作動限・復帰限用オートスイッチ(別売品)の装着が可能です。●ストローク(mm):20●幅(mm):40●奥行(mm):71●高さ(mm):24●取付穴:2-M5●出力(N)押し:154●構造:単動型●使用空気圧力:0.4~0.5Mpa●押し出力:154N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 13,190円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・複動型 388-6825(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●ストローク(mm):20●幅(mm):40●奥行(mm):66●高さ(mm):24●取付穴:3-M5●出力(N)押し:154●出力(N)引き:129●構造:複動型●使用空気圧力:0.4~0.5Mpa●押し出力:154N(使用圧力0.5Mpa時)●引き出力:129N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 9,386円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・複動型 388-6823(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●ストローク(mm):25●幅(mm):40●奥行(mm):71●高さ(mm):24●取付穴:2-M5●出力(N)押し:154●出力(N)引き:129●構造:複動型●使用空気圧力:0.4~0.5Mpa●押し出力:154N(使用圧力0.5Mpa時)●引き出力:129N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 9,512円(税込)
数量

![]()
トラスコ中山 アインツ ミニコンテナシリンダー・複動型 388-6828(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●コンパクトボディーで回り止めガイド付きです。●円滑な動作を実現しました。●ストローク(mm):30●幅(mm):40●奥行(mm):76●高さ(mm):24●取付穴:2-M5●出力(N)押し:154●出力(N)引き:129●構造:複動型●使用空気圧力:0.4~0.5Mpa●押し出力:154N(使用圧力0.5Mpa時)●引き出力:129N(使用圧力0.5Mpa時)●配管接続:M5●接続ホース:φ4mm
価格: 9,765円(税込)
数量
![]()
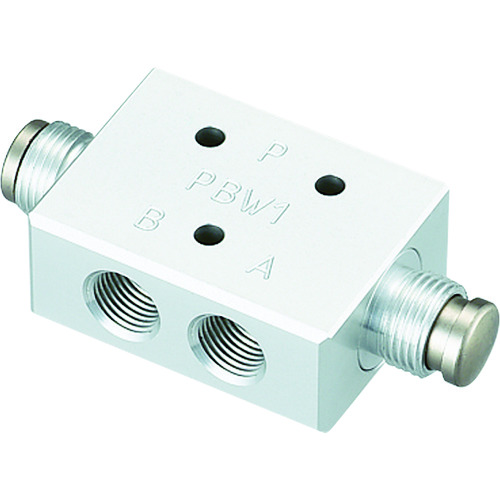
トラスコ中山 アインツ 手動押ボタン(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●エアーの切り替え(A/B)にご使用ください。●幅(mm):30●奥行(mm):16.5●高さ(mm):63●3ポート●押ボタン保持式
価格: 7,609円(税込)
数量

![]()
トラスコ中山 アインツ 取付金具・ミニエアーニッパー用 388-8399 (ご注文単位1個) 【直送品】
ロボットハンド用パーツ
●オリジナルナット(M8)でフレーム等に固定が可能です。●適合機種:NW-50/NW-50R●幅(mm):42●奥行(mm):55●高さ(mm):44●NWニッパーアクセサリー●ニッパー固定金具●ニッパー取付用ボルトM6×10(4本)
価格: 5,300円(税込)
数量

![]()
トラスコ中山 アインツ EPスポンジ 115-6843(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●パットへ直接貼付できる粘着テープ式です。(粘着が弱い場合、シリコン系接着剤で補強して下さい。)●吸着面に凸凹の有るワークに有効です。●目的:凹凸の吸収●径(mm):30●厚さ(mm):6.5●目的:凸凹の吸収●耐熱温度(℃):80℃●エチレンプロピレンゴム(EPDM)
価格: 533円(税込)
数量

![]()
トラスコ中山 アインツ SDシート(静電気除去) 115-6839(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●パットへ直接貼付できる粘着テープ式です。●吸着跡への対策、塗装やメッキ処理が必要なワークに対し有効です。●静電除去、除じんに。●径(mm):30●厚さ(mm):0.4●耐熱温度(℃):80℃●表面抵抗値:3×10[[の4乗]]Ω/□(スクエア)●極細繊維不織布
価格: 838円(税込)
数量

![]()
トラスコ中山 アインツ シリコンスポンジ (ご注文単位1個)【直送品】
ロボットハンド用パーツ
●ワークへの傷防止等にご使用ください。●適宜カットして使用できるフリーサイズタイプです。●幅(mm):250●奥行(mm):250●高さ(mm):3●色:茶●シリコンスポンジ
価格: 6,088円(税込)
数量
![]()
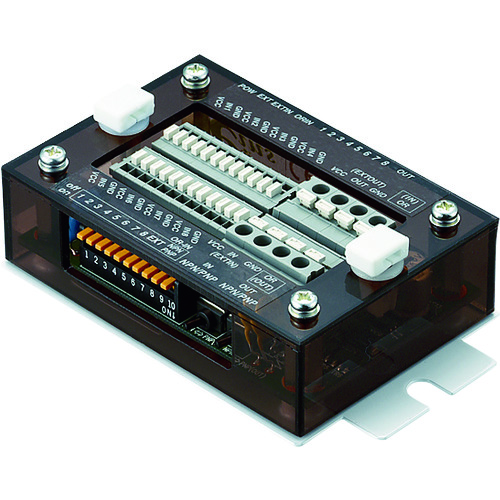
トラスコ中山 アインツ マルチAND基板(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●最大8点のセンサー入力を基板内でAND化し、1点出力が可能です。(AND/OR-EU)●最大4点のセンサー入力を基板内でAND化し、1点出力が可能です。(AND/OR-EU-4P)●センサーを直接接続するだけの簡単設計となっているため、省配線、省スペース化に優れています。●ディップスイッチでセンサー数、PNP/NPN選択が可能です。●幅(mm):57●高さ(mm):29●長さ(mm):102●最大接続センサー数:8点●電源電圧(V):DC24(±10%)●内部消費電流(mA):100/50(DC24V時)●センサー入力電流(mA):10以下/1点●使用周囲湿度(%):35~80(結露しないこと)●使用周囲温度:0~40℃●使用雰囲気:粉塵、腐食性ガスが無いところ●AND、/OR出力の切り換えが可能
価格: 13,951円(税込)
数量
![]()
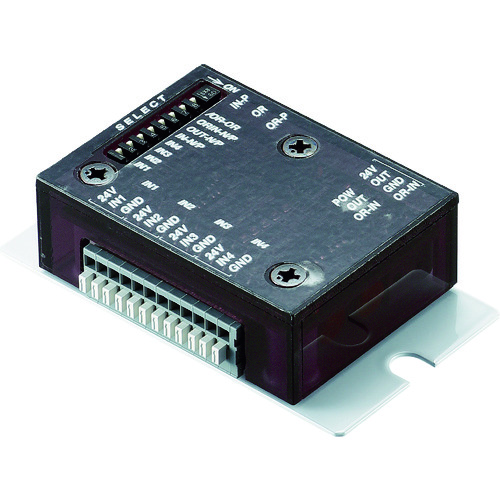
トラスコ中山 アインツ マルチAND基板4P(ご注文単位1個)【直送品】
ロボットハンド用パーツ
●最大8点のセンサー入力を基板内でAND化し、1点出力が可能です。(AND/OR-EU)●最大4点のセンサー入力を基板内でAND化し、1点出力が可能です。(AND/OR-EU-4P)●センサーを直接接続するだけの簡単設計となっているため、省配線、省スペース化に優れています。●幅(mm):40●高さ(mm):20●長さ(mm):72●最大接続センサー数:4点●電源電圧(V):DC24(±10%)●内部消費電流(mA):100/50(DC24V時)●センサー入力電流(mA):10以下/1点●使用周囲湿度(%):35~80(結露しないこと)●使用周囲温度:0~40℃●使用雰囲気:粉塵、腐食性ガスが無いところ●AND、/OR出力の切り換えが可能
価格: 9,765円(税込)
数量

![]()
トラスコ中山 アインツ CFRPパイプ φ20(ご注文単位1本)【直送品】
ロボットハンド用パーツ
●CFPR(カーボン)繊維を使用し軽量化を実現。●長さ(mm):1500●幅(mm):20●ジャングルジムシリーズ●接続:ジャングルジムφ20●SUSパイプ重量543g⇒200g(63.2%の軽量)
価格: 19,658円(税込)
数量


























